Neural Network
Recap of Neural Network
Neural networking learning
Using data to adapt (train) the parameters (weights) of a mathematical model.
Simple neuron models

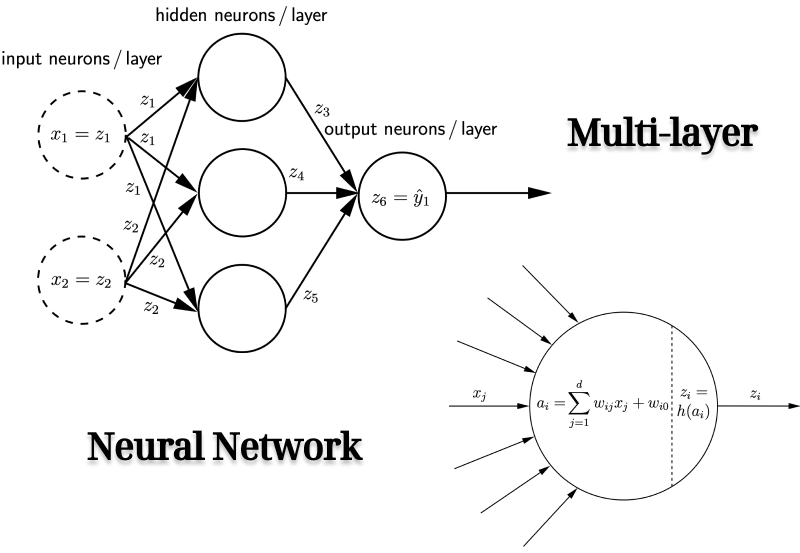
Input is the vector $\boldsymbol{x}$ or $\vec{x}\in \mathbb{R}^d$.
\[\boldsymbol{x} = (x_1, ..., x_d)\]Output of neuron $i$ be denoted by $z_i(\boldsymbol{x})$. Omit dependency on $\boldsymbol{x}$ to keep uncluttered.
- Integration: Computing weighted sum with bias parameter $w_{i0}\in \mathbb{R}$
- Firing: Applying transfer function (activation function) $h$:
We have an input with $d$ dimension for the neural network. For each node $i$, the first step is to calculate the integration which accepts all the incoming $x_i$ from $\boldsymbol{x}$ with corresponding weights $w_{ij}$, and then, add the bias $w_{i0}$. The second step is to activate the integration to be its output $z_{i}(\boldsymbol{x})$.
Some common activation functions

- Step / threshold:
- Fermi / logistic:
- Hyperbolic tangens:
- Alternative sigmoid:
- Rectified linear unit (ReLU):
- Exponential LU (ELU):
and $\alpha > 0$
Simple neural network models
Neural network (NN) is a set of connected neurons.
It can be described by a weighted directed graph. 1. Neurons are the nodes/vertices and numbered by integers $V = {0, 1, 2, …}$. 2. Connections between neurons are the edges $A$. 3. Strength of connection $(j, i)\in A$ from neuron $j$ to neuron $i$ is described by weight $w_{ij}$. 4. All weights are collected in weight vector $\boldsymbol{w}$.
To Feed-forward NNs: we do not allow cycles in the connectivity graph.
NN represents mapping
\[f: \mathbb{R}^d \to \mathbb{R}^K\]parameterized by $\boldsymbol{w}: f(\boldsymbol{x; w})_i = \hat{y}_i$
In another representation with multiplications \*
\[f: \mathbb{R}^d \times \mathbb{R}^M \to \mathbb{R}^K\]where $\mathbb{R}^M$ represents weights. Here, we omit the biases as they can be written together with weights? $w_{i0}$
In other words, $\mathbb{R}^M$ is the vector $w_{i0}, \text{all the weights}$. \*
Notation
$d$ input neurons, $K$ Output neurons, $M$ hidden neurons:

Therefore, the whole set of vertices $V$ is,
\[V = \{0 \} \cup V_{\text{input}} \cup V_{\text{hidden}} \cup V_{\text{output}} = \{0, 1, 2, ..., d+M+K \}\]Activation function of neuron $i$ is denoted by $h_i$,
\[h_i(a) = a\text{ for } i\in \{0\} \cup V_{\text{input}}\]Typically $h_i \neq h_j$ for $i \in V_{\text{hidden}}$ and $j \in V_{\text{output}}$
Neuron $i$ can get only input from neuron $j$ if $j < i$, this ensures that the graph is acyclic $\leftarrow$ Feed-Forward NN
Activation of neuron $i>1$ is
\[a_i = \sum_{(j, i)\in A}w_{ij}z_j\]Output of neuron $i$ is denoted by $z_i$
$z_i(a_i) = h_i(a_i)$
$z_0(\cdot) = 1$ ($w_{i0}z_0$ is the bias parameter of neuron $i$. Defintion?)
$z_i(\cdot) = x_i$ for $i$ for $i\in V_{\text{input}} = {1, …, d }$
Output of the network $f(\boldsymbol{x;w})$
\[f(\boldsymbol{x;w}) = \pmatrix{z_{M+d+1}\\z_{M+d+2}\\...\\z_{M+d+K}} = \pmatrix{\hat{y_1}\\ \hat{y_2} \\ ... \\ \hat{y_K}}\]Sum-of-squres error
NN shall learn function
\[f: \mathbb{R}^d \to \mathbb{R}^K\]$\implies d$ input neurons, $K$ output neurons
Training data
\[S = \{(\boldsymbol{x}_1, \boldsymbol{y}_1), ..., (\boldsymbol{x}_N, \boldsymbol{y}_N)\}, \boldsymbol{x}_i \in \mathbb{R}^d, \boldsymbol{y}_i\in \mathbb{R}^K, 1\leq i \leq N\]$# \text{training} = N$.
Usually , linear output neurons:
\[h_i(a) = a \text{ for $i \in V_{\text{output}}$}\]Sum-of-squares error
\[E = \frac{1}{2}\sum^N_{n=1}\Vert f(\boldsymbol{x}_n\boldsymbol{; w}) - \boldsymbol{y}_n\Vert^2\]Back Propagation
Here we define $L$ represents loss, sum of the errors is below,
\[E(\boldsymbol{x; w}) = L\left(f(\boldsymbol{x;w}), \boldsymbol{y}\right)\]To minimize $E$ by adjusting the weights $\boldsymbol{w}$, compute the $\nabla_\boldsymbol{w} E$.
Below is an concrete example to help understand the back propagation by SGD
The algorithm randomly generates $\boldsymbol{w}$, for each $w$ inside, using the following formula to update it such that coverage to the ground-truth.
\[w^+ = w - \eta \cdot \frac{\partial E}{\partial w}\]Here, $\frac{\partial E}{\partial w}$ is the current $\nabla_w E$ which represents the range of the change for $w$ with respect to $E$, $\eta$ is the so-called learning rate (normally less than $0.1$) used to control the step.
The reason to compute the gradient is to estimate the true $\boldsymbol{w} \implies \nabla_w E$.
Chain Rule
Assume $y = g(x), z = f(y)$, then, $z = h(x), h=f\circ g$ where $h$ is a compound function.
We know that,
\[\frac{d_y}{d_x} = g'(x), \frac{d_z}{d_y}=f'(y)\]By calculus,
\[h'(x) = \frac{d_z}{d_x} = \frac{d_z}{d_y} \cdot \frac{d_y}{d_x}\]This is the case of single variable, but it suits for the multiple variables.
Example of BP

Here we have two layers, there are two neurons $x_1 = 1, x_2=0.5$ in the input layer, two neurons $h_1, h_2$ in the hidden layer, and the final neuron $y$ for output layer. Each neuron gets fully connected.
Given that the ground-truth values for $\boldsymbol{w}$,
\[w_1 = 1, w_2 = 2, w_3 = 3, w_4 = 4, w_5 = 0.5, w_6 = 0.6\]In this setting, the true value for $t = 4$.
To mock a process of back propagation, assume we only know $x_1 = 1, x_2 = 0.5$ and the target $t = 4$.
First, randomly generates the weights,
\[w_1 = 0.5, w_2 = 1.5, w_3 = 2.3, w_5 = 1, w_6 = 1\]Then, conduct the forward pass,
\[\begin{align} h_1 & = w_1 \cdot x_1 + w_2 \cdot x_2 = 1.25\nonumber \\ h_2 & = w_3 \cdot x_1 + w_4 \cdot x_2 = 3.8\nonumber \\ y & = w_5 \cdot h_1 + w_6 \cdot h_2 = 5.05\nonumber \\ E & = \frac{1}{2}(y-t)^2 = 0.55125\nonumber \end{align}\]Sequently, do the backward pass. $y$ is the expected value from NN, and the target true is $t = 4$, we need to update $w_5$.
\[\frac{\partial E}{\partial w_5} = \frac{\partial E}{\partial y} \cdot \frac{\partial y}{\partial w_5}\]Because $E = \frac{1}{2}(t - y)^2$, therefore,
\[\begin{align} \frac{\partial E}{\partial y} & = 2 \cdot \frac{1}{2} \cdot (t-y)\cdot (-1)\nonumber \\ & = y - t\nonumber \\ & = 5.05 - 4\nonumber \\ & = 1.05\nonumber \end{align}\]For $y = w_5 \cdot h_1 + w_6 \cdot h_2$,
\[\frac{\partial y}{\partial w_5} = h_1 + 0 = h_1 = 1.25\]By the chain rule,
\[\begin{align} \frac{\partial E}{\partial w_5} & = \frac{\partial E}{\partial y} \cdot \frac{\partial y}{\partial w_5} = (y-t)\cdot h_1\nonumber\\ & = 1.05 \cdot 1.25 = 1.3125\nonumber \end{align}\]Updating $w_5$ by using previous formula, where $\eta = 0.1$,
\[\begin{align} w_5^+ & = w_5 - \eta \cdot \frac{\partial E}{\partial y}\nonumber \\ & = 1-0.1 \cdot 1.3125\nonumber \\ & = 0.86875 \nonumber \end{align}\nonumber\]Update the $w_6$ in the same steps $\implies w_6^+ = 0.601$
Move to $w_1, w_2, w_3, w_4$, take the computation for $\nabla w_1 E$ as an example,
\[\frac{\partial E}{\partial w_1} = \frac{\partial E}{\partial y} \cdot \frac{\partial y}{\partial h_1} \cdot \frac{\partial h_1}{\partial w_1}\]$\frac{\partial E}{\partial y} = y - t$ has already been computed and for $y = w_5 \cdot h_1 + w_6 \cdot h_2$,
\[\frac{\partial y}{\partial h_1} = w_5 + 0 = w_5\]By $h_1 = w_1 \cdot x_1 + w_2 \cdot x_2$,
\[\frac{\partial E}{\partial w_1} = x_1 + 0 = x_1\]Therefore,
\[\frac{\partial E}{\partial w_1} = (y-t) \cdot w_5 \cdot x_1\]Update $w_1$, and similar for the rest.
\[w_1^+ = 0.395, w_2^+ = 1.4475, w_3^+ = 2.195, w_4^+ =2.9475\]Conduct the forward pass again,
\[y^+ = 3.1768, E^+ = 0.3388 < E\]Repeating the steps above, then that is the back propagation.
To get connection with our lectures,
\[\begin{align} \nabla_w E = (D_wE)^\text{T}\nonumber \\ D_w E = D_1 L \cdot D_w f\nonumber \end{align}\]Here,
\[D_wf = \pmatrix{\frac{\partial f^1}{\partial w^1} & ... & \frac{\partial f^1}{\partial w ^M}\\... & ... & ... \\ \frac{\partial f^K}{\partial w^1} & ... & \frac{\partial f^K}{\partial w^M}}, \text{ Jacobian Matrix}\]We can do the following derivation. We already know that $f(\boldsymbol{x; w})$ can be written like below,
\[f(\boldsymbol{x; w}) = \boldsymbol{h}^N\left(\boldsymbol{w}^N \boldsymbol{h}^{N-1}(\boldsymbol{w}^{N-1}...\boldsymbol{h}^1(\boldsymbol{wx}) \right)\]Then, $D_wf$ could be written as,
\[D_wf = D\boldsymbol{h}^ND\boldsymbol{w}^ND\boldsymbol{h}^{N-1}....D\boldsymbol{h}^1D\boldsymbol{w}^1\]Each item above is a matrix. Then, compute the $\nabla_wE$.
\[\begin{align} \nabla_w E & = (D_w E)^\text{T} = (D f)^\text{T} (D L)^\text{T}\nonumber\\ & = (Dw^1)^\text{T}(Dh^1)^{\text{T}} ... (Dw^ N)^\text{T}(Dh^ N)^\text{T}(DL)^\text{T}\nonumber \end{align}\]As the last weights always need to be computed than the previous, then, that is the reason for calling back propagation.
Lecture written-note

Reference
Christian Igel. (2023). Neuron Networks. Deep Learning. UCPH
HexUp. (2018). Back Propagation(梯度反向传播)实例讲解. 知乎专栏. https://zhuanlan.zhihu.com/p/40378224
Stefan Sommer. (2023). Recap of Neural Networks. Advanced Deep Learning. UCPH